
PQArt是一款非常好用的机器人离线编程仿真软件,为用户提供非常方便的一站式编程功能,帮助用户轻松解决各种机器人编程问题,让每一位用户可以体验到最轻松的机器人编程方法。而且PQArt企业版还为用户提供模拟仿真功能,让用户可以通过模拟测试来运行机器人编程,避免产生不必要的浪费。
PQArt机器人离线编程软件更是拥有非常友好的操作界面,让用户可以轻松上手进行操作,快速编写机器人程序,有兴趣的用户快来本站下载这款软件吧。
软件特色
轨迹生成与编辑
九大类生成轨迹方式,上百个轨迹参数,数十个参数化轨迹修改方式,总有一款适合您!
可达空间
软件不仅可以计算机器人的法兰位置的可达空间,也可以计算机器人末端执行器的可达空间,让您的工作站设计和轨迹规划更加真实高效。
外部工具
机器人工作方式常见的有以下两种:
1. 手持工具,零件固定;
2. 手持零件,工具固定;
第二种成为外部工具,变成更复杂。PQArt提供了外部工具、变位工具、连续TCP、工件坐标系等配合使用,使手持零件不再复杂。
碰撞检测
仿真时,开启碰撞检测功能,可以模拟检测出机器人在运动时和周边的零部件、设施的碰撞情况,并通过高亮线和输出碰撞信息加以提示。
轨迹优化处理
可把轨迹中的奇异点、轴限位、不可达、碰撞等信息反映在界面上,通过鼠标拖动自动避让,快速获得理想轨迹,提高工作效率。
外部轴
通过外部轴联动的插值功能,用户可优化外部轴位置以实现沿整个刀具路径的平滑运动,而不需要手动修改每个机器人之间的目标位置控制点。
软件亮点
1、支持工件校准功能,能够根据真实情况与理论模型的参数误差自动调整轨迹参数。
2、支持多种格式的三维CAD模型,可导入扩展名为STEP、IGS、STL、x_t、prt(UG)、prt(ProE)等格式。
3、可视化轨迹优化和机器人姿态优化功能。
4、包括焊接、喷涂、去毛刺、数控加工等多种工艺包。
5、支持多种品牌工业机器人离线编程操作,可导入本体模型,控制各轴运动,仿真运行设计的轨迹(例ABB、KUKA、Staubli、广州数控等)。
6、支持自由组装、设计机器人,学习机器人原理与运动过程。

PQArt安装教程
1、首先用户在本站下载PQArt压缩包
2、然后使用解压功能将压缩包打开,双击主程序即可进行安装,弹出程序安装界面

3、同意上述协议条款,然后继续安装应用程序,点击同意按钮即可
4、可以根据自己的需要点击浏览按钮将应用程序的安装路径进行更改
5、弹出应用程序安装进度条加载界面,只需要等待加载完成即可
6、根据提示点击安装,弹出程序安装完成界面,点击完成按钮即可
PQArt怎么设置后置
1.基本后置介绍及流程
位置:位于【机器人编程】下的【基础编程】中。

说明:“后置”功能将在软件中生成的轨迹、坐标系等一系列信息生成机器人可执行的代码语言,可以拷贝到示教器控制真机运行。
后置处理界面介绍
单击基础编程中的【后置】,弹出“后置处理”的对话框:
缩进设置
缩进设置主要是编辑后置文件的格式,这个一般选择默认的【空格】。
机器人末端后置和工具末端后置
这两个是选择输出的代码以机器人末端坐标(法兰坐标系)为准还是以工具末端坐标为准。
轨迹点命名
轨迹点命名由前缀和编号组成,这个根据个人喜好进行设置,一般也会选择在这个界面选择默认的选项。
有时在后置时,需要将一条轨迹(假设有90个点)拆开导出或保存,可以将轨迹前半部分(假设有49个点)的第一点编号设置为1,后半部分的第一点编号可以设置为50.
程序名称
程序的名称可自行输入和修改。一般来说,该名称为示教器所识别的模块名称。
使用注释
注释是指解释代码语言的文字。
是否使用注释根据需要设定。
后置代码编辑器
点击【生成文件】后,弹出后置代码编辑器,生成的代码如下:
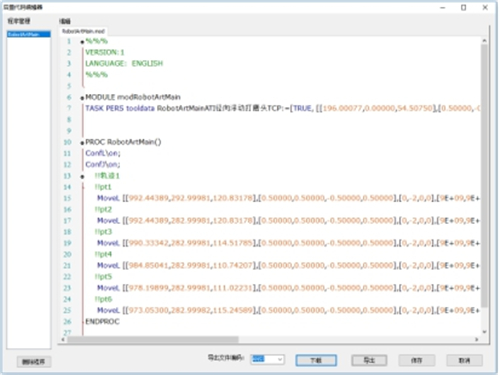
不同的机器人后置会生成不同的文件格式.KUKA机器人会后置出两个文件:DAT/SRC.其他机器人会后置出一个后缀为mod的文件。
后置代码的显示方式:点的坐标、字符和注释用不同颜色区别开来,代码查看起来清晰明了。
有行号显示,方便定位某一行的代码。
折叠功能,同一组别或者段落的代码可以实现手动折叠展开和收起。
导出文件编码:包括ANSI和UTF-8两种编码。ANSI编码不支持代码程序中包含中文字符,UTF-8则允许包含中文字符,从而根据特定品牌的机器的后置需求来选择这两种编码。
ANSI详细讲解:ANSI
UTF-8详细讲解:UTF-8
导出:将后置出的文件直接拷贝到真实示教器,从而完成真机的运行。
保存:后置代码会保存在编辑器中。
后置格式的具体显示样式,如字体颜色、背景色、折叠方式等都用XM控制。
因此,用户可依据实际需求,自定义后置的具体显示样式。
2.自定义后置
位置:位于【自定义】下的【后置】中。

说明:自定义后置,即自定义机器人的后置代码,大幅度增加了后置代码书写排列的灵活性,满足多种后置需求。自定义后置一般与自定义机器人相关联。自定义机器人时需选择后置类型,将自定义的后置 文件导入,即可为自定义的机器人设置后置格式。
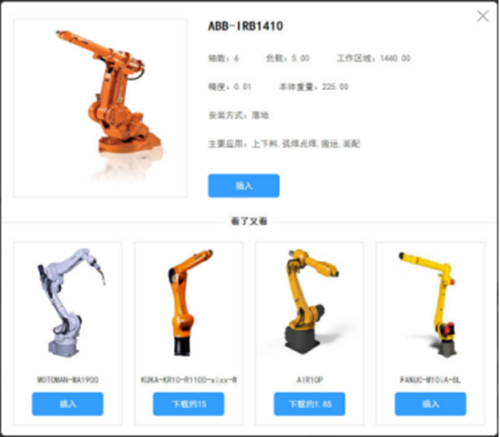
PQArt怎么导入机器人
该功能位于【机器人编程】下的【场景搭建】中。
插入官方机器人模型:通过机器人的“品牌”、“主要应用”、“负载”、“工作域”和“轴数”等条件来筛选出所需机器人的型号;通过搜索来直接插入目标机器人;
点击界面中的机器人图片,会显示出机器人的相关参数:负载、工作范围、轴数、主要应用等;“看了又看”中提供的是与所选机器人参数相似的机器人型号。
PQArt支持自定义通用六轴机器人、非球型六轴机器人以及SCARA机器人,在市场上存在多种机器人品牌和型号的情况下,最大限度满足市场需求。
PQArt是什么
PQArt(原RobotArt)是我国拥有自主知识产权的工业机器人离线编程软件。公司旗下的“华航筑梦”是以工业机器人为核心的智能制造领域线上服务平台,提供人才学习、认证培训、招聘就业以及相关工业软件服务。PQArt是系列工业软件中核心产品之一,始于2013年,经过多年的研发与应用,PQArt掌握了多项核心技术,包括3D平台、几何拓扑、特征驱动、自适应求解算法、开放后置、碰撞检测、代码仿真等。它的功能覆盖了机器人集成应用完整的生命周期,包括方案设计、设备选型、集成调试及产品改型,累计已有4万多人使用PQArt进行学习或工作。
在人才培养领域,有大量在校学生以PQArt虚拟仿真与离线编程为入口开始自己的机器人学习与从业生涯。同时,PQArt也为教育部中职、高职机器人相关赛项提供技术支持,选手们在PQArt软件中一展自己的才华。


精品软件
























- 飞鸽传书 局域网通信 IP Messenger 汉化版v4.84
- 新浪UC蝴蝶版 (更快的进出房间/经典怀旧)官方简体免费版v2.0
- 按键神通(支持动作录制和回放功能) 中文绿色免费版v2.0
- 系统封装部署利器 中文绿色版v5.19.715.279
- 快车(FlashGet)国际版 (强大的超线程技术下载工具)官方多国语言版v3.7.0.1156
- 风行 官方最新版v3.0.6.95
- Smart Defrag Portable 多国语言绿色便携版v6.4.0.256
- Wise Registry Cleaner Pro中文绿色版v10.2.6
- OO Defrag Server Edition(适用于服务器版的磁盘整理)10.0.1634汉化特别版v10.0.1634
- 微软恶意软件删除工具(x86)官方中文版v5.76
- 智能驱动(方正出品驱动程序备份工具)绿色特别版V2.0
- BitComet 官方版(比特彗星)v1.59
- TCPView(可用于静态查看端口和线程) 汉化绿色版v3.0
- 飞鸟(Flyer)全球速度最快的下载工具 官方简体安装版V3.0
- VeryCD eMule c Build 0120(支持Vista)多国语言绿色稳定版V0.49
- Nero Burning Rom c 快乐无极精简修正版v9.4.13.2
用户评论
最新评论
- 置顶 西藏那曲电信 网友 疯人院毕业
真正好用
- 置顶 黑龙江大庆电信 网友 柔情妹子万人迷
这用处太大了
- 置顶 河北廊坊联通 网友 心似狂潮
能运行就好 好多都被屏蔽了 感谢
- 置顶 山东东营电信 网友 可爱到不行
来看看好不好用
- 置顶 山东青岛移动 网友 笙情
我只想说一句很好很强大!
最新专题
更多>最新更新
更多>热门标签
软件排行榜
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10